ODrive USB-CAN Adapter Datasheet

The ODrive USB-CAN adapter is a compact and robust CAN interface that connects to a host via USB-C. It’s designed for use with ODrive products, but is compatible with any CAN 2.0B device.
The USB-CAN adapter features dual CAN connectors, with JST-GH for plug-and-play wiring to ODrive devices, and a screw terminal for flexibility in all wiring situations and other CAN applications.
The USB-CAN adapter is compatible with CAN 2.0B, up to 1Mbit/s. It shows up as a native SocketCAN device under Linux, enabling support for can-utils as well as a wide variety of programming languages. Additionally, it can be used with python-can under Linux, Windows, and Mac OS.
An onboard termination resistor switch allows for easy termination of a CAN bus, and onboard indicator LEDs report send/recieve data activity for user feedback.
5V power from USB is supplied on the VBUS line, and an anti-backfeed circuit allows up to 30V external.
Preassembled wire harnesses to connect the USB-CAN adapter to an ODrive S1 or Micro are available on the shop page.
Electromechanical Specifications
CAD
The ODrive USB-CAN Adapter CAD model is available on the ODrive USB-CAN Adapter OnShape page.
Electrical
Note
All specifications are in 0◦C ≤ TA≤ 40◦C unless otherwise noted.
Specification |
Value |
Notes |
|---|---|---|
Power Input |
4.5 – 5.5V |
Over USB Type-C |
Signaling Protocol |
CAN 2.0B |
10 Kbit/s to 1 Mbit/s |
ESD Protection |
±15 kV ±15 kV ±8 kV ±30 kV |
USB Power Line, IEC 61000-4-2 USB Data Lines, IEC 61000-4-2 CAN Data Lines, IEC 61000-4-2 VBUS Power Line, IEC 61000-4-2 |
CANH/CANL Max Voltage |
±58 V |
Abs max, referenced to device GND |
Current Output |
500 mA |
USB Supply over VBUS line, fused |
Mechanical
Specification |
Value |
Notes |
|---|---|---|
Weight |
11.8g 5.8g |
With case Without case |
Width Length Height |
36.14 mm 40.16 mm 13.65 mm |
With case |
Bolt Pattern |
25 mm x 32 mm |
M2.5 Clearance |
Environmental
Specification |
Value |
Notes |
|---|---|---|
Humidity |
Non-Condensing |
|
Ingress Protection |
IP20 |
With case |
Interface
Specification |
Value |
Notes |
|---|---|---|
USB Speed |
12Mbps |
USB 2.0 FS |
CAN Baudrate |
10Kbit/s – 1Mbit/s |
|
TX Buffer Size |
64 |
CAN Frames |
RX Buffer Size |
3 |
CAN Frames |
Device Protocol |
gs_usb compatible |
Pinout
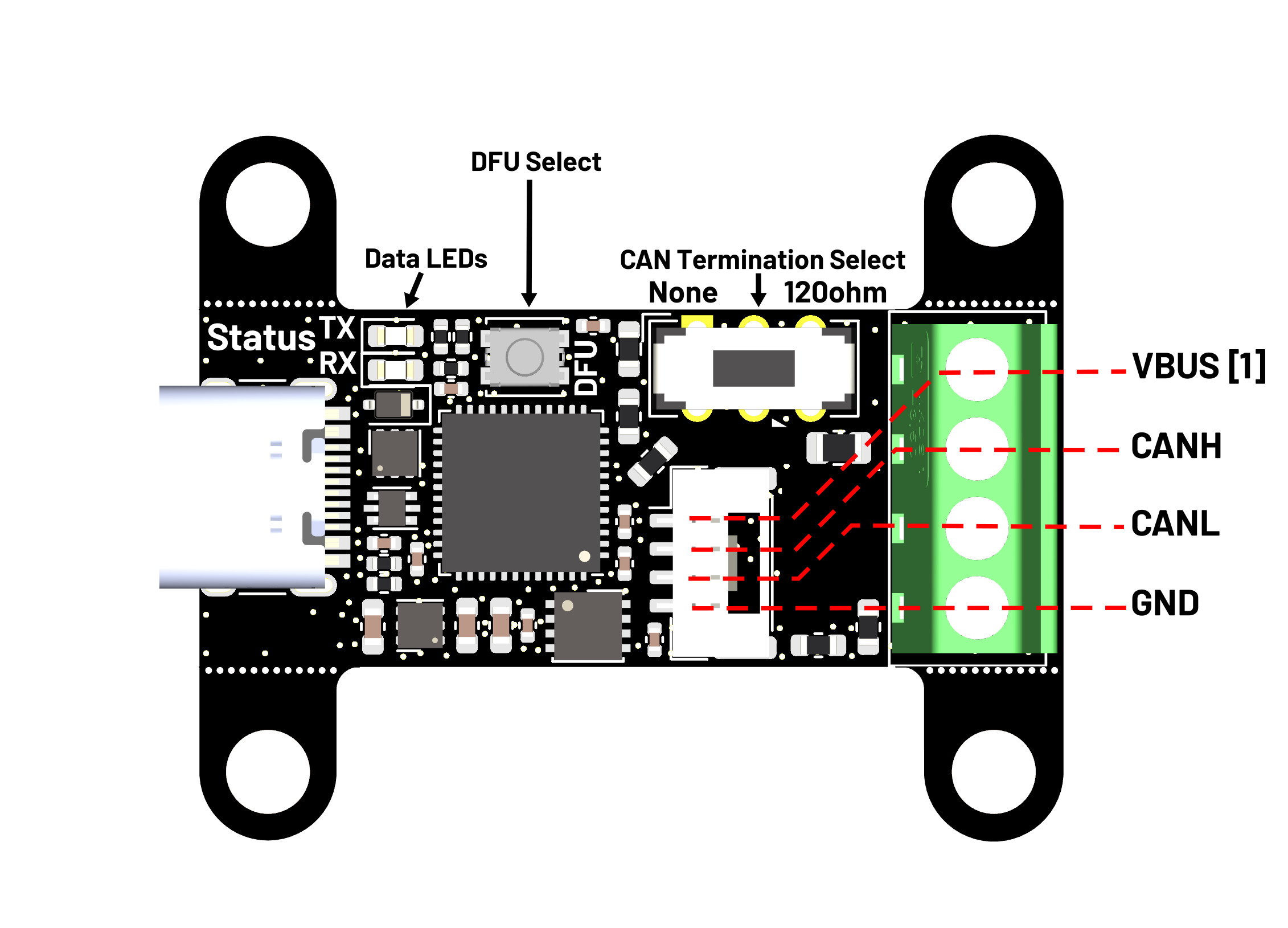
[1] VBUS is 4.75V nominal output, and tolerant of up to 30V. See Power section for details.
Connectors
Connector |
Type |
Mating housing |
Mating Crimp |
|---|---|---|---|
CAN JST-GH |
JST-GH 4-pos |
GHR-04V-S |
SSHL-002T-P0.2 |
CAN Screw Terminal |
Screw Terminal 4-pos |
N/A |
16-28 AWG Wire |
Wiring and Isolation
Note that while the fusing on the USB-CAN adapter provides nominal protection against ground loops, care still must be taken. As well, the USB-CAN adapter must share a ground domain with the connected CAN devices.
This means that in many cases, it is required to use a USB isolator with the USB-CAN adapter, and/or to have an external ground tie between the USB-CAN adapter and the system DC-.
For general information and wiring, please see the CAN grounding diagram.
Power
The USB-CAN adapter provides a useful USB-derived voltage output on the VBUS pin / CAN power line. This output is diode-protected, and will not backfeed to the USB power, so higher voltages (up to 30V) are allowed on the VBUS line. This ensures compatibility for CAN devices deriving power from the power/ground wires in the CAN cable (up to 30V), such as an ODrive Pro or S1 using the 12V standby power input over the CAN cable, or an ODrive Micro with CAN power lines bridged to DC+/-.
The USB-CAN adapter is additionally designed to protect the upstream USB-connected computer in the event of catastrophic failure, such as an overvoltage spike or sustained overcurrent on the output power connection.
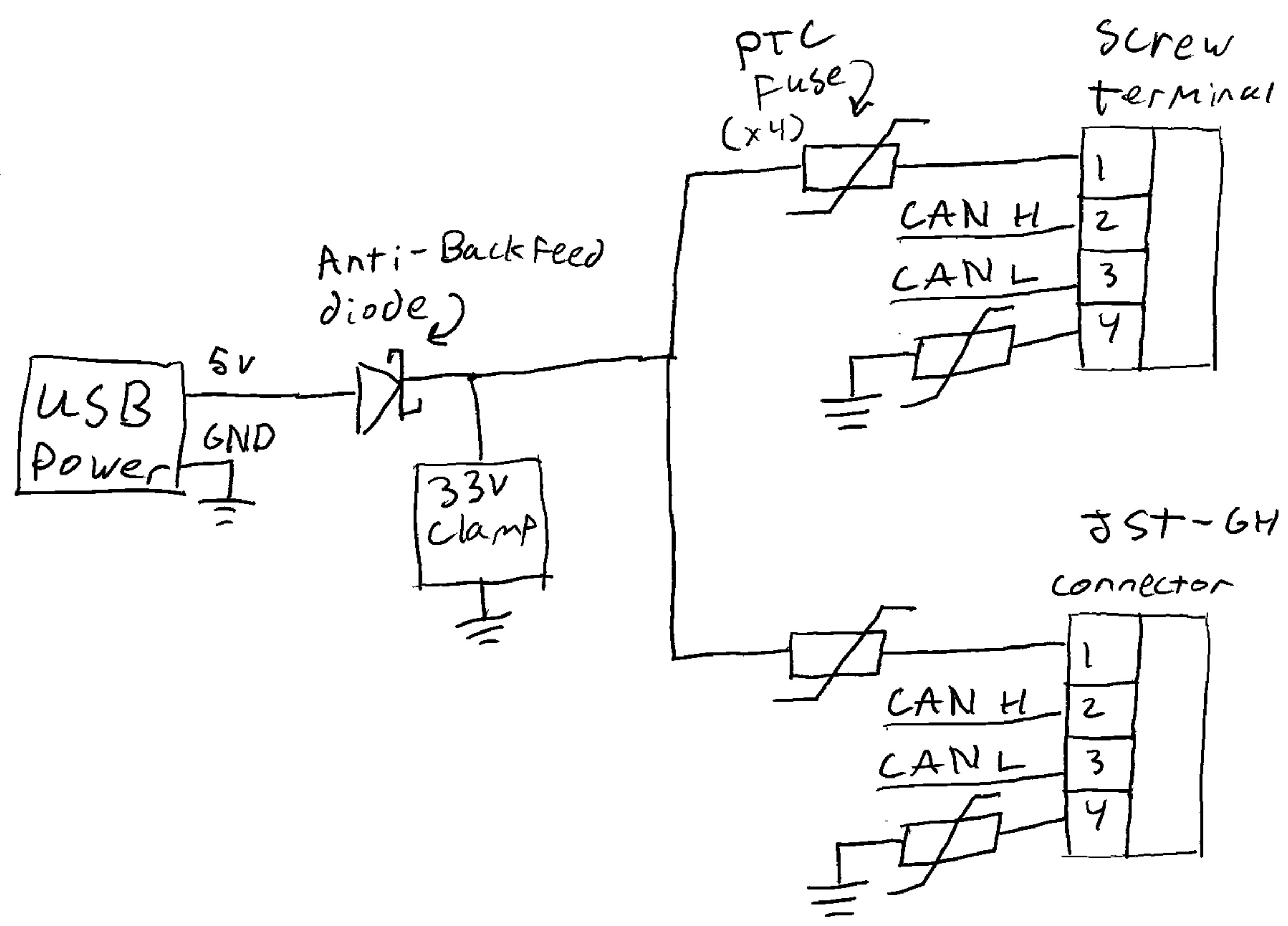
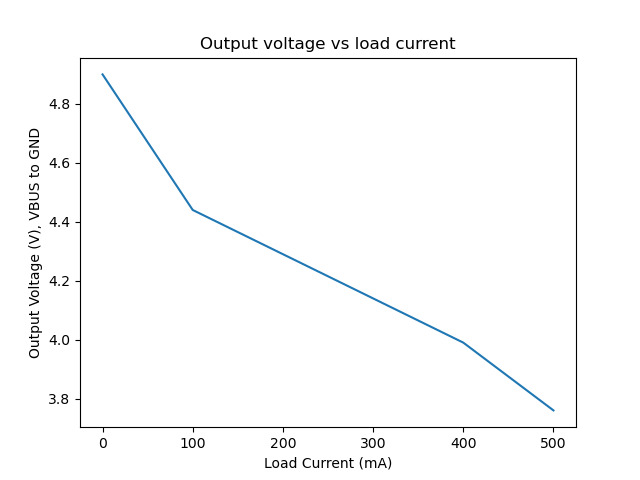
The USB power is fed through a diode, and each VBUS / GND output is individually fused with a 500mA PTC (resettable) fuse. A circuit clamps the VBUS voltage to 33V, preventing damage to the upstream USB-connected computer.
In testing, a typical no-load VBUS output voltage is 4.8-4.9V. However, the PTC fuse elements add resistance to both the VBUS output and GND return, causing voltage drop with increasing current draw from the VBUS/GND outputs. A chart of nominal output voltage versus load current is provided below:
Usage & Compatibility
The ODrive USB-CAN Adapter is the interface of choice for future ODrive software, such as odrivetool and GUI over CAN bus. These features are under active development, and are expected for public beta Q4 2024. In the meantime, please contact us if you are interested in beta testing.
The USB-CAN Adapter uses a gs_usb compatible firmware. This means that under Linux, it shows up as a native SocketCAN device, and thus a generic networking port (similar to Ethernet or WiFi). Unfortunately, Windows and Mac OS do not support native CAN devices, however the USB-CAN adapter can still be used with any CAN library with gs_usb support. We typically recommend use with the python-can library, however others may exist.
Upon connecting the ODrive USB-CAN adapter, it will show up as a CAN port such as can0. This can be seen with the ip addr command. Example output:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host noprefixroute
valid_lft forever preferred_lft forever
2: wlp0s20f3: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc noqueue state UP group default qlen 1000
link/ether 8c:f8:c5:3b:6c:35 brd ff:ff:ff:ff:ff:ff
inet 192.168.1.213/24 brd 192.168.1.255 scope global dynamic noprefixroute wlp0s20f3
valid_lft 73339sec preferred_lft 73339sec
inet6 fe80::c915:97ab:92b3:42cb/64 scope link noprefixroute
valid_lft forever preferred_lft forever
15: can0: <NOARP,ECHO> mtu 16 qdisc noop state DOWN group default qlen 10
link/can
To enable the USB-CAN adapter at a specified baudrate (here, 250000 baud), run the following commands:
sudo ip link set can0 type can bitrate 250000
sudo ip link set up can0
If successful, the can0 interface output of ip addr will look similarly to the below:
15: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UP group default qlen 10
link/can
From here, it can be used with any SocketCAN compatible library or tool, such as can-utils, or in nearly any programming language with a SocketCAN library, such as python, C/C++, Rust, Javascript, etc.
For example, in Python, using python-can:
Until CAN support for odrivetool and the ODrive GUI is publically released (which will include Python libraries for ODrive interface over CAN), the best known option is to use the gs_usb interface in the python-can library.
Note that for the ODrive USB-CAN adapter, the channel/product ID is 0x606f.
For example, in Python, using python-can:
Unbinding from SocketCAN on Linux
By default, Linux will use the USB-CAN adapter as a native SocketCAN device (e.g. can0). However, this prevents the Web GUI from being able to access and manage the USB-CAN adapter. In order to use the Web GUI over CAN on Linux, we need to unbind the SocketCAN kernel driver and change the device permissions:
# Unbind the gs_usb kernel driver from all connected USB-CAN Adapters
for d in /sys/bus/usb/drivers/gs_usb/*:*; do
[ -e "$d" ] && echo "$(basename "$d")" | sudo tee /sys/bus/usb/drivers/gs_usb/unbind
done
# Change device permissions to allow access by the browser
for dev in /dev/bus/usb/*/*; do
if lsusb -s ${dev##*/} 2>/dev/null | grep -q "1d50:606f"; then
sudo chmod 666 "$dev"
fi
done
This will make the USB-CAN Adapter unavailable for other applications that use it via SocketCAN.
To undo this and return ownership to SocketCAN, simply replug the USB-CAN Adapter or reboot the host.
Note
While SocketCAN is the recommended interface on Linux outside the Web GUI, both odrivetool and the Python package can access the USB-CAN adapter directly after unbinding.